Examples¶
Import Library¶
import age3d as a3d
Jupyter environment detected. Enabling Open3D WebVisualizer.
[Open3D INFO] WebRTC GUI backend enabled.
[Open3D INFO] WebRTCWindowSystem: HTTP handshake server disabled.
Import Mesh¶
file_path = 'models/monkey.stl'
mesh = a3d.import_mesh(file_path)
mesh.compute_vertex_normals()
print(mesh)
TriangleMesh with 2866 points and 968 triangles.
Export Mesh¶
export_file_path = 'models/export.stl'
a3d.export_mesh(export_file_path ,mesh)
Clean Mesh¶
print('Original:', mesh)
a3d.clean_mesh(mesh)
print('Cleaned:', mesh)
Original: TriangleMesh with 2866 points and 968 triangles.
Cleaned: TriangleMesh with 505 points and 968 triangles.
vertices, triangles = a3d.mesh_details(mesh)
print(vertices, triangles)
[[ 0.46875 -0.7578125 0.2421875]
[ 0.4375 -0.765625 0.1640625]
[ 0.5 -0.6875 0.09375 ]
...
[-1.0234375 0.484375 0.4375 ]
[ 0.859375 0.3828125 0.3828125]
[-0.859375 0.3828125 0.3828125]] [[ 0 1 2]
[ 0 2 3]
[ 4 5 6]
...
[379 491 410]
[493 384 380]
[493 380 412]]
Point Cloud Creation¶
pc = a3d.make_point_cloud(vertices, (255, 0, 0))
Visualization¶
a3d.visualize(mesh)

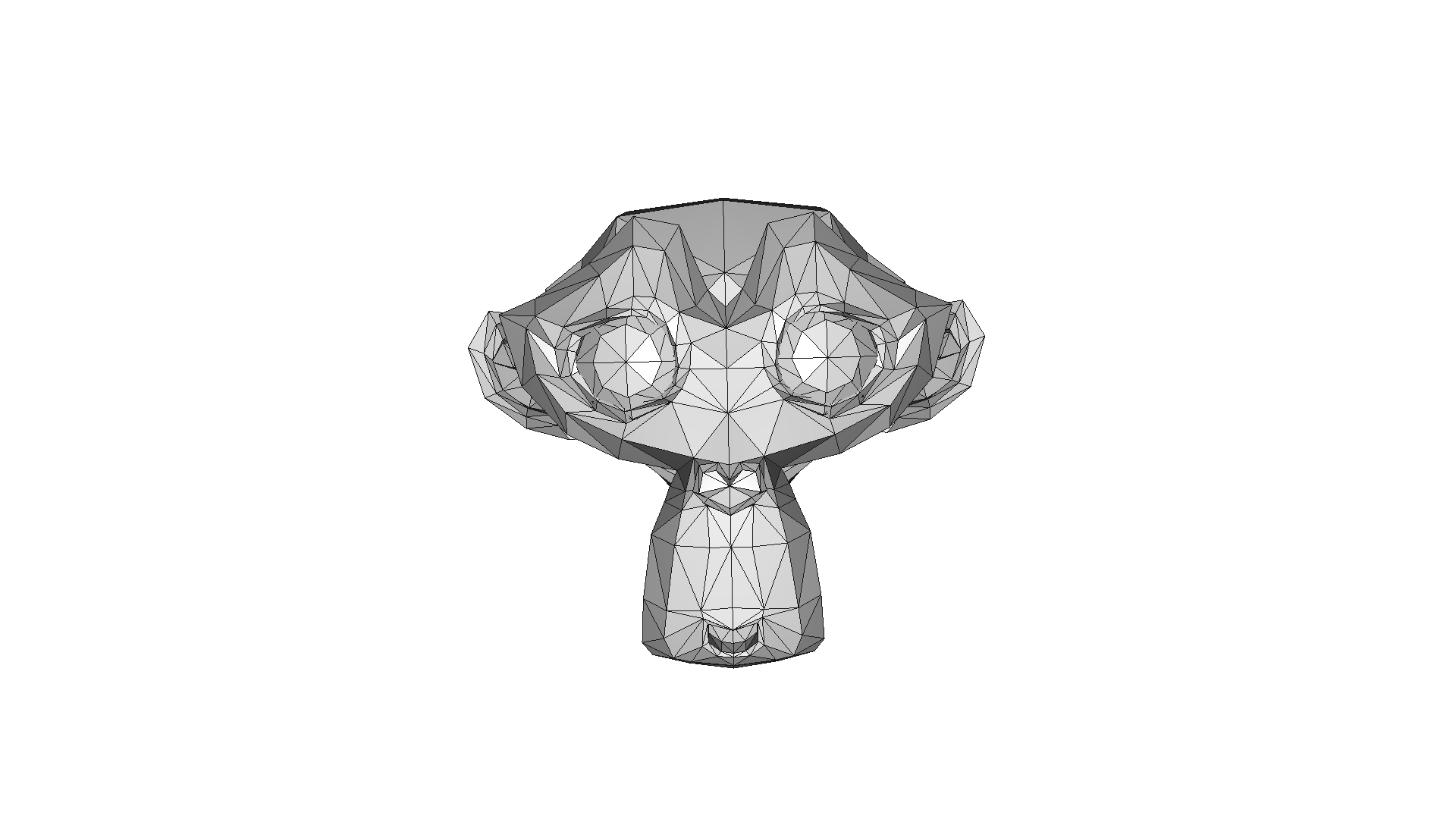
a3d.visualize(mesh, show_wireframe=True)
a3d.visualize([mesh, pc])

Get Vertex Mask¶
a3d.get_mask(mesh, [0, 1, -1])
array([ True, True, False, False, False, False, False, False, False,
False, False, False, False, False, False, False, False, False,
False, False, False, False, False, False, False, False, False,
...
False, False, False, False, False, False, False, False, False,
False, False, False, False, False, False, False, False, False,
True])
Find Minimum(s) & Maximum(s)¶
min_idxs, min_vertices = a3d.find_minimum(mesh,k = 1)
min_pc = a3d.make_point_cloud(min_vertices, (255, 0, 00))
max_idxs, max_vertices = a3d.find_maximum(mesh, k = 10)
max_pc = a3d.make_point_cloud(max_vertices, (0, 0, 255))
a3d.visualize([mesh, min_pc, max_pc])

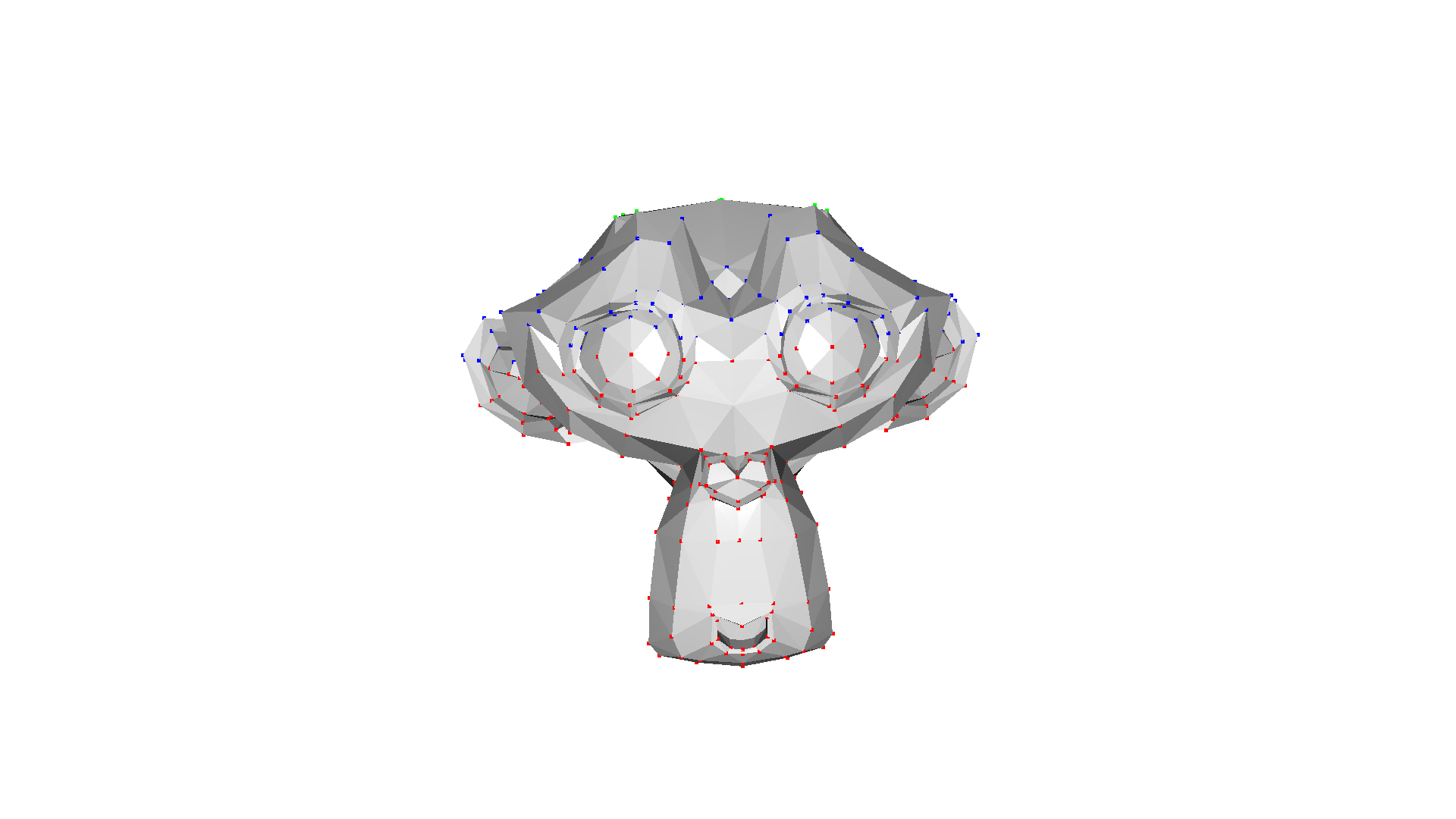
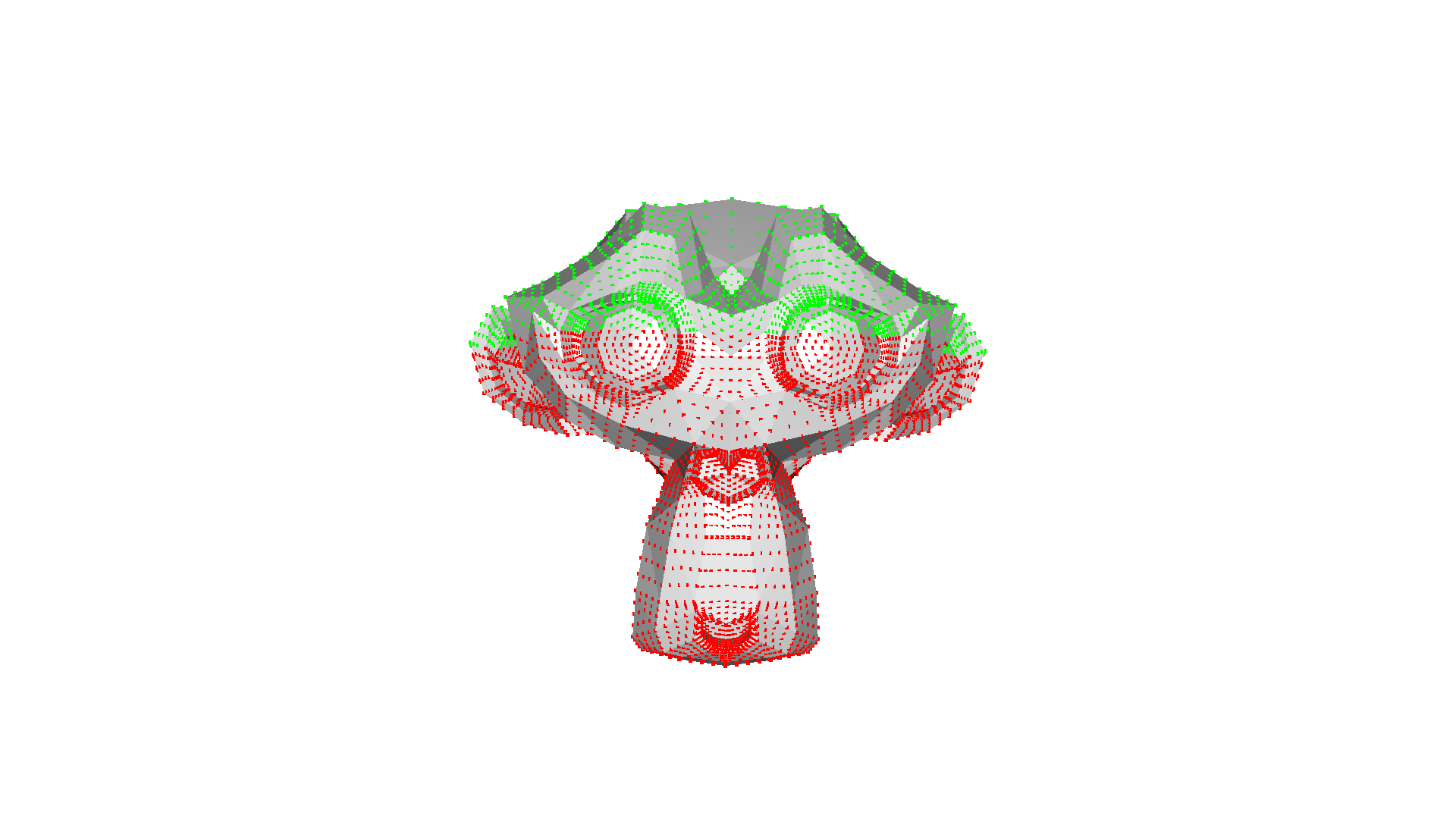
Find All Below, Above, & Between¶
below_idxs, below_vertices = a3d.find_all_below(mesh, 0.25, inclusive=True)
below_pc = a3d.make_point_cloud(below_vertices, (255, 0, 0))
above_idxs, above_vertices = a3d.find_all_above(mesh, 0.75, inclusive=True)
above_pc = a3d.make_point_cloud(above_vertices, (0, 255, 0))
between_vertices = a3d.find_all_between(mesh, 0.25, 0.75)
between_pc = a3d.make_point_cloud(between_vertices, (0, 0, 255))
a3d.visualize([mesh, below_pc, above_pc, between_pc])
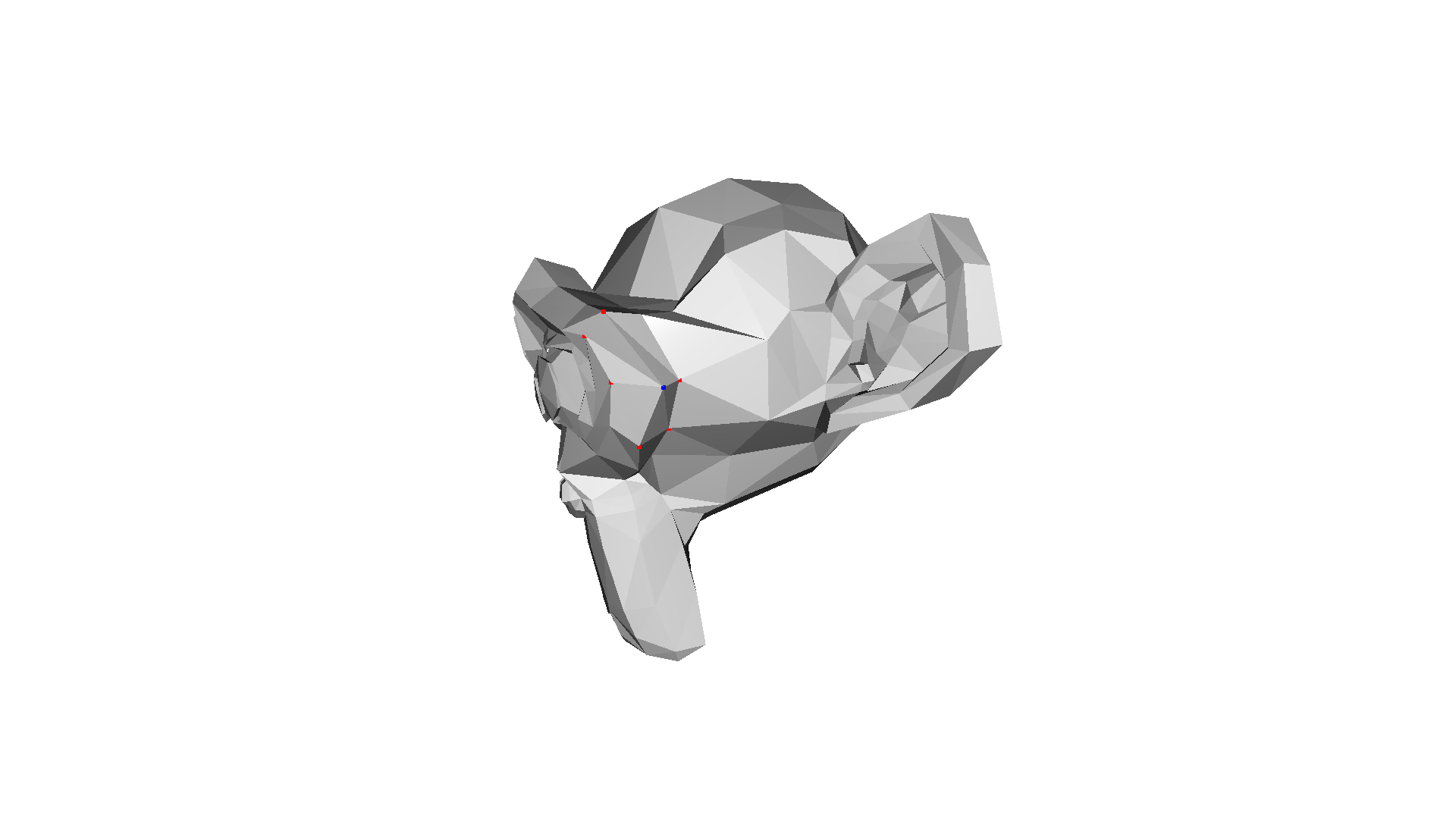
Find Neighbors¶
center_idx = 100
neighbors_idx, neighbors_vertices = a3d.find_neighbors(mesh, center_idx)
neighbors_pc = a3d.make_point_cloud(neighbors_vertices, (255, 0, 0))
center_vertex = vertices[a3d.get_mask(mesh, center_idx)]
center_pc = a3d.make_point_cloud(center_vertex, (0, 0, 255))
a3d.visualize([mesh,neighbors_pc, center_pc])
Mesh Subdivision¶
print(mesh)
mesh = a3d.mesh_subdivision(mesh, iterations=2)
print(mesh)
vertices, triangles = a3d.mesh_details(mesh)
print(vertices, triangles)
a3d.visualize(mesh, show_wireframe=True)

TriangleMesh with 505 points and 968 triangles.
TriangleMesh with 7828 points and 15488 triangles.
[[ 0.46875 -0.7578125 0.2421875 ]
[ 0.4375 -0.765625 0.1640625 ]
[ 0.5 -0.6875 0.09375 ]
...
[-0.73632812 0.23632812 -0.12890625]
[-0.6875 0.1953125 -0.12890625]
[-0.73242188 0.18554688 -0.1328125 ]] [[ 0 1978 1980]
[1978 505 1979]
[1979 507 1980]
...
[7826 1709 7827]
[7827 1924 7825]
[7826 7827 7825]]
Bound Height¶
bound_height = a3d.calculate_bounds_height(mesh)
print(bound_height)
below_idxs, below_vertices = a3d.find_all_below(mesh, bound_height)
below_pc = a3d.make_point_cloud(below_vertices, (255, 0, 0))
above_idxs, above_vertices = a3d.find_all_above(mesh, bound_height)
above_pc = a3d.make_point_cloud(above_vertices, (0, 255, 0))
a3d.visualize([mesh, below_pc, above_pc])
0.296875
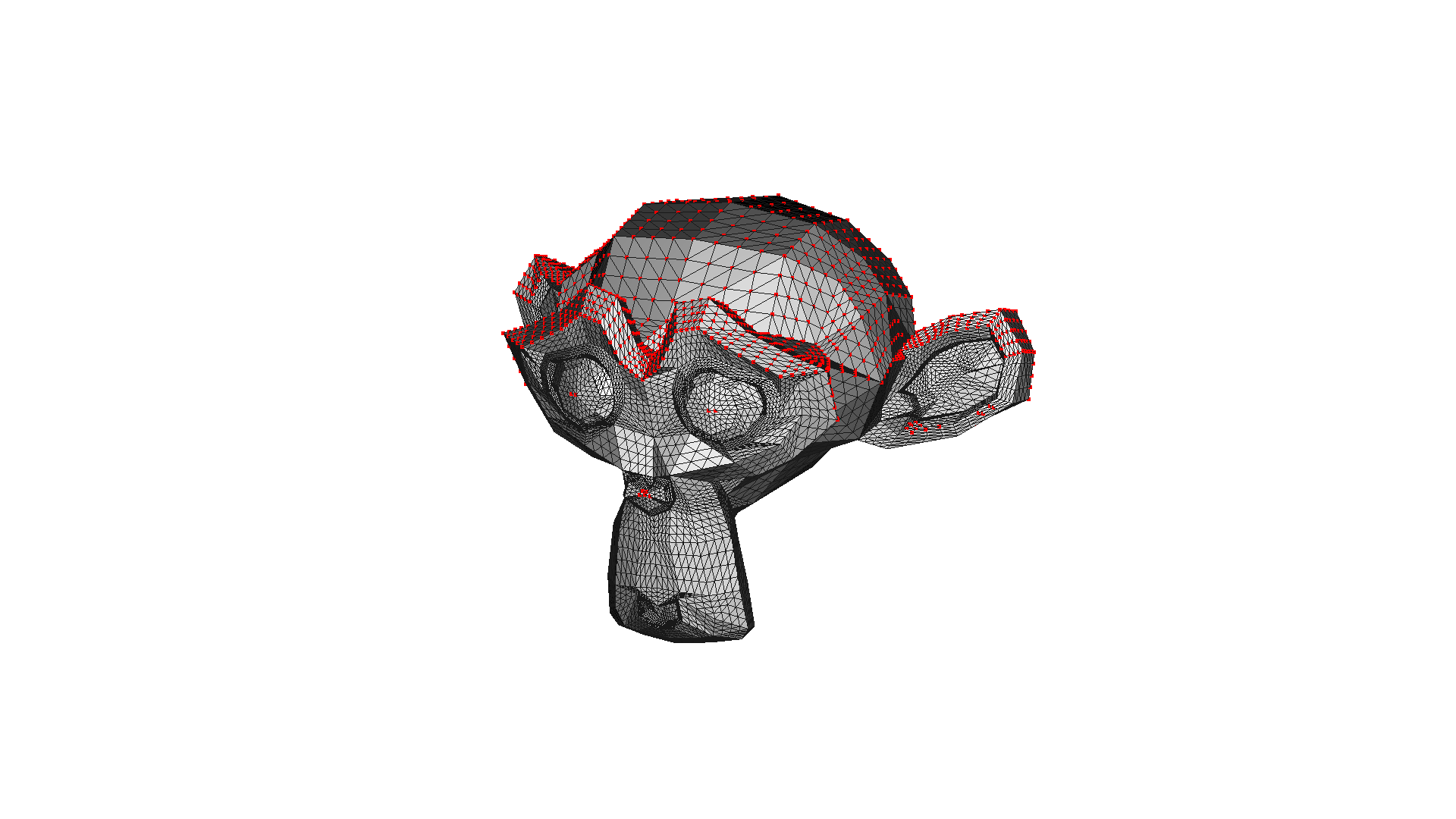
Find Accessible¶
direction = [0, 0, -1]
accessible_idx, accessible_vertices = a3d.find_accessible(mesh, direction)
accessible_pc = a3d.make_point_cloud(accessible_vertices, (255, 0, 0))
a3d.visualize([mesh, accessible_pc], show_wireframe=True)
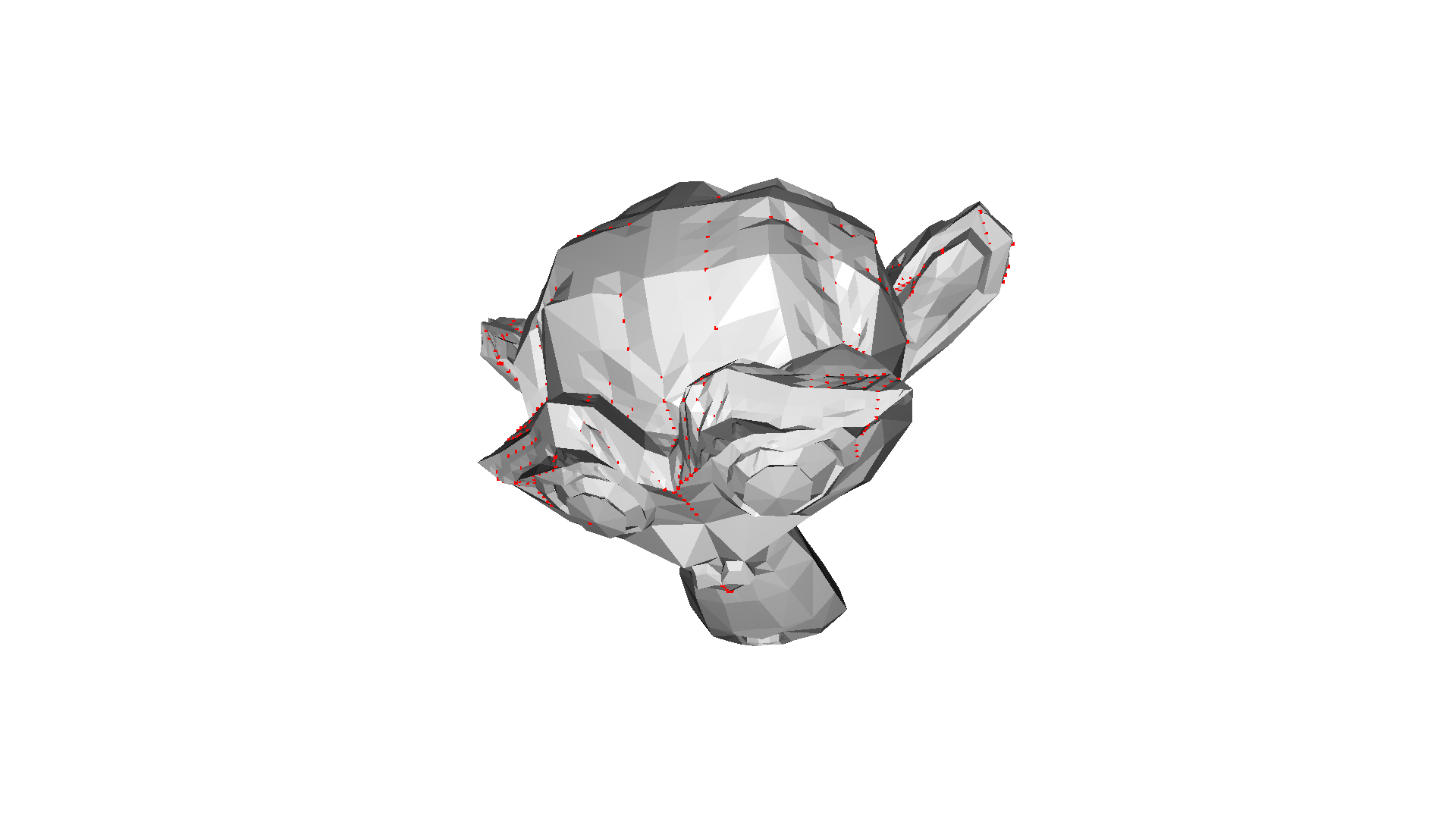
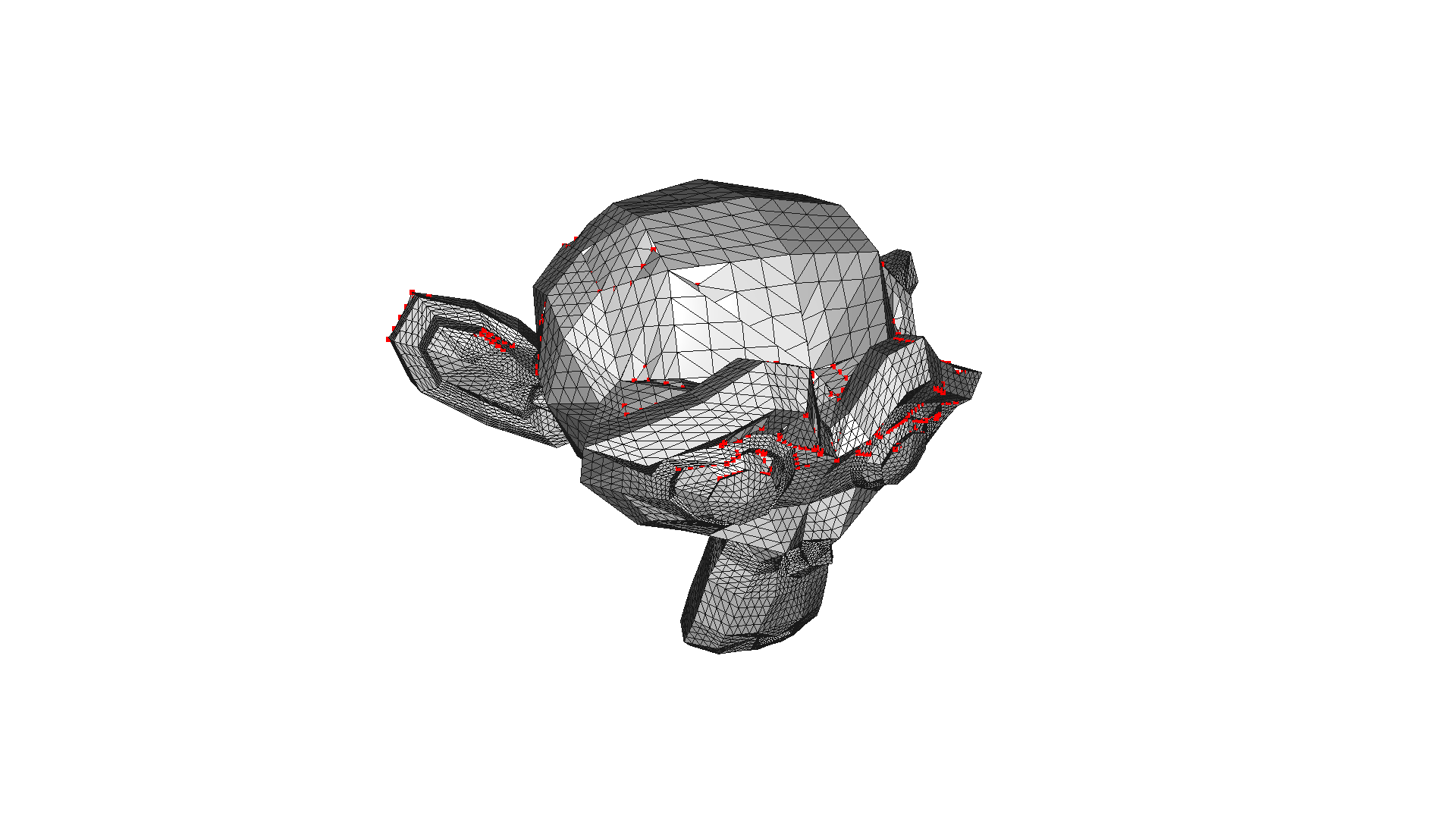
Erode¶
updated_idxs, eroded_mesh = a3d.erode(mesh, iterations=100, erosion_lifetime=10)
eroded_mesh.compute_vertex_normals()
updated_pc = a3d.make_point_cloud(vertices[updated_idxs], (255, 0, 0))
a3d.visualize([eroded_mesh, updated_pc], True)
Iter: 0 , V_idx: 7569
Iter: 1 , V_idx: 1537
Iter: 2 , V_idx: 6081
...
Iter: 97 , V_idx: 4564
Iter: 98 , V_idx: 113
Iter: 99 , V_idx: 130
a3d.visualize([eroded_mesh, updated_pc])
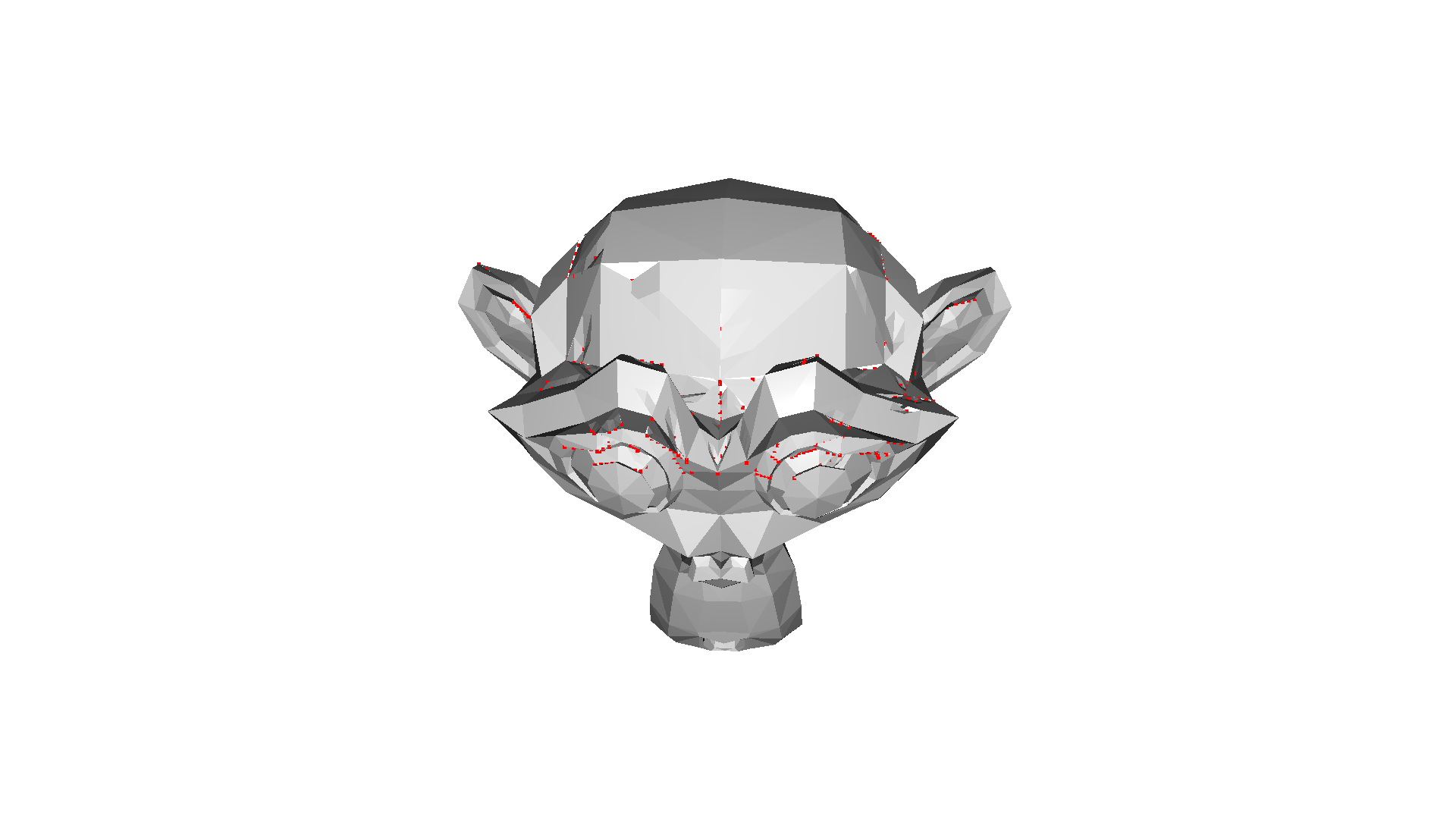
updated_idxs, eroded_mesh = a3d.erode(mesh, iterations=100, erosion_lifetime=10, direction=direction)
eroded_mesh.compute_vertex_normals()
updated_pc = a3d.make_point_cloud(vertices[updated_idxs], (255, 0, 0))
a3d.visualize([eroded_mesh, updated_pc], True)
Iter: 0 , V_idx: 7693
Iter: 1 , V_idx: 1537
Iter: 2 , V_idx: 6131
...
Iter: 97 , V_idx: 5687
Iter: 98 , V_idx: 120
Iter: 99 , V_idx: 192
a3d.visualize([eroded_mesh, updated_pc])